数控剪板机床所采用的不同类型的主轴电动机对应着不同类型的驱动器。直流电动机对应直流主轴驱动器。直流驱动器有可控硅和脉宽调制(PWM)调速两种形式。脉宽调制调速装置在对静态、动态性能要求高的数控机床进给驱动装置上的使用较为广泛,三相全控晶闸管调速装置适合大功率场合,因此,常用于直流主轴驱动器。目前,大多数数控机床都采用鼠笼式交流异步电动机和矢量变频调速器构成的主轴系统。如前面所述,交流电动机已经逐渐取代直流电动机,所以这里只对交流主轴驱动器的工作原理进行介绍。
交流主轴驱动器工作原理
在使用一般的变频器调速时,交流电动机没有直流电动机的调速性能优异,因此,需要采用矢量变换控制技术。矢量变换控制(Transvector Contr01)技术最早是在1971年由德国的Felix Blaschke等人提出,矢量变换控制技术的基本原理是以产生同样的旋转磁场为目的,把交流电动机模拟成为直流电动机来控制。这一技术完全不同于过去的交流电动机的控性能和直以分别进行调三相交流电动交流电其磁场矢磁电流者励磁流量转与直流。
交流主轴驱动器工作原理
在使用一般的变频器调速时,交流电动机没有直流电动机的调速性能优异,因此,需要采用矢量变换控制技术。矢量变换控制(Transvector Contr01)技术最早是在1971年由德国的Felix Blaschke等人提出,矢量变换控制技术的基本原理是以产生同样的旋转磁场为目的,把交流电动机模拟成为直流电动机来控制。这一技术完全不同于过去的交流电动机的控制技术,对交流电动机的调速实现了较为理想的控制,使交流电动机调速后的动态性能和机械性能与直流电动机的不相上下。
数控
剪板机直流电动机之所以具有良好的控制性能,是因为其励磁绕组和电枢绕组相互独立,可以分别对励磁电流和电枢电流进行调节,直流电动机可以通过单独调节主磁场或电枢磁场进行调速。此外,直流电动机的主磁场和电枢磁场方向互相垂直。交流电动机中定子通以三相交流电产生旋转磁场,主磁场和转子电流磁场问的夹角与转子回路功率因数相关,交流电动机的电磁转矩不仅和气隙磁通、转子电流有关,还和交流电动机的转速有关,因此,交流电动机难以控制。如果交流电动机的负载电流和励磁电流能够分别进行控制,并且使其磁场方向在空间上垂直,就可以解决这个问题了。
矢量变换控制技术通过一系列坐标变换,将三相交流电转化为等效的、相互独立的励磁电流和电枢电流,使交流电动机可以像直流电动机一样,通过对等效的电枢绕组电流或者励磁绕组电流的控制,来控制转矩和励磁磁通。然后,再进行相反的变换,使等效的直流量转换为三相交流量,以便对三相交流电动机进行控制。这样,交流电动机的数学模型与直流电动机的十分相似,大大提高了交流电动机的调速性能。
1.三相一二相变换(3/2)
三相一二相变换前后必须有同样的旋转磁动势,也就是说必须产生同样的旋转磁场。这个变换将三相交流电动机转换为等效的二相交流电动机。如图7—4所示中,u、v、W为三相交流电动机的三个定子绕组,互相间隔为120。相位,分别通相差为120。的三相交流电fU、fv和fW,定子绕组产生角速度为彩的旋转磁场。如果在空间位置相差90。的两相绕组cc、p通以相差90。的平衡电流屯、f8,那么就可以产生与三相绕组的旋转磁场大小、转速都相同的空间旋转磁场。
图4三相一二相变换
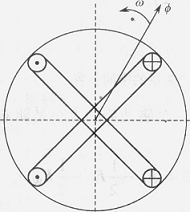
图5所示为三相绕组u、V、W和与之等效的两相绕组Gt、B各相磁通势矢量的空间位置。
图5二相绕组和二相绕组磁通势矢量的空I司位置
图中各个矢量仅表示空间位置,不表示其大小。各个磁动势的大小是随着时间变化的,满足一下公式,即各自对应的电流。
2.矢量旋转变换(V/R)
三相一二相变化之后,还需要将两相交流电动机变换为等效的直流电动机。两相电动机a、13绕组和直流电动机中励磁绕组、电枢绕组之间的变换属于矢量与标量的转换,是静止直角坐标系与旋转直角坐标系的转换,变换的条件是保证合成磁通势不变。如图6所示,数控剪板机直流电动机的励磁磁通势电枢磁通势正交。图6中,为励磁绕组中通过的励磁电流,f0为电枢绕组中通过的电枢电流,它们产生的合成磁通势为痧,同步旋转角速度为彩,这样交流电动机就可以看做直流电动机。由图6可以看出,屯、fR合成矢量f1,在合成磁通势水平方向和垂直方向的投影分别为fd。
3.直角坐标一极坐标变换(K/P)
图6中由fd、fq求得的和为直角坐标一极坐标变换。直角坐标与极坐标之间关系因为范围很大,所以常用下式表示:
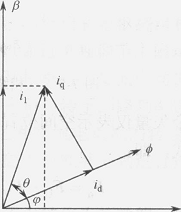
图6两相交流电动机和直流电动机的等效变换